")
Sisukord:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 08:50.
- Viimati modifitseeritud 2025-01-23 14:40.

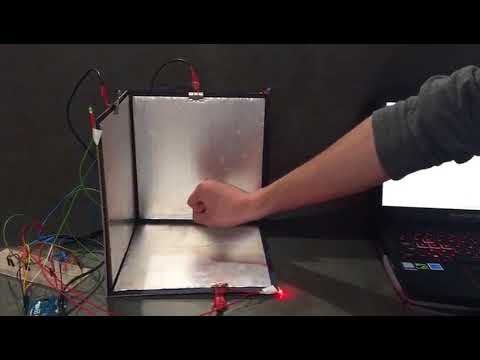

Selles juhendis selgitatakse, kuidas käe liikumist saab 3D -ruumis jälgida, kasutades mahtuvusliku tuvastamise põhimõtet. Kui muudate laetud alumiiniumfooliumi ja käe vahelist kaugust, muutub kondensaatori võimsus. Seda meetodit saab kasutada inertsiaalsete ja optiliste süsteemide madala hinnaga alternatiivina 3D-ruumis liikumise jälgimiseks. Sellele prototüübile lisasime LED -id, mis helendavad, kui objekt liigub alumiiniumfooliumilehele liiga lähedale.
Samm: vajalikud tööriistad ja materjalid
- 3x 270k oomi takisti
- 3x 10k oomi takisti
- 3x alligaatori klamber
- 1x punane LED
- 1x sinine LED
- 1x roheline LED
- 3x 220 oomi takisti
- jootet
- Kuumus kahaneb
- varjestuskaabel
- Arduino Uno
- alumiiniumfoolium
- Papp
- lint
- pihustage liimi
- Leivalaud
- Ühendusjuhtmed (erineva pikkusega)
2. samm: raami ehitamine




Lõika välja kolm ruudukujulist papitükki (250x250 mm) ja kolm ruudukujulist alumiiniumfooliumi tükki (230x230 mm). Kandke pihustusliim alumiiniumfooliumi ühele küljele ja kandke igaüks papitükkidele. Selles prototüübis toimivad alumiiniumfooliumi lehed meie mahtuvuslike anduritena. Seetõttu veenduge, et alumiiniumfooliumi ja papi äärise vahel oleks piisavalt ruumi, nii et pärast raami kokkupanekut ei puutuks see kokku erinevate fooliumilehtede vahel. Kui foolium on papile kantud, on aeg raami lõpetamiseks lindi abil kokku panna kolm papitükki. Jällegi veenduge, et alumiiniumfooliumilehtede vahel ei oleks kontakti.
Samm: kilbijuhtmete ühendamine plaadi ja Arduinoga



Kilede ühendamiseks vooluringiga on oluline kasutada varjestatud kaablit. Tavaliste kaablite kasutamine tekitab antenniefekti ja häirib anduri näitu. Veenduge, et teil oleks 3 varjestatud kaablit, mis on umbes 50 cm pikad. Võtke üks kaabel, eemaldage traat, katkestage varjestusjuhtmed ja ühendage see ainult sisemise juhtmega, jootes traadi alligaatoriklambri külge. Veenduge, et rakendate jootmisühenduse katmiseks termokahanevust. Kinnitage alligaatori klambrid alumiiniumfooliumi külge.
Ühendage kõik kaitsetraadid oma leivalaua positiivse reaga. Seejärel ühendage see positiivne rida oma Arduino 5V ühendusega. Võtke nüüd põhikaabel varjestuskaablist ja ühendage paralleelselt 10 kΩ ja 220 kΩ takisti. Ühendage see oma Arduino väljundpordiga (kasutasime 8, 9 ja 10).
Korrake seda sammu veel 2 korda prototüübi teiste tasapindade puhul.
Samm: LED -ide juhtmestik




Jootke valgusdioodide otsad pikaks juhtmeks, et see jõuaks arduino plaadilt vastavate plaatide nurkadesse.
Meie kasutasime LED -ide väljundnõeltena kontakte 2, 3 ja 4. See väljund on ühendatud leivaplaadiga ja ühendatud LED -i positiivse jalaga. Seejärel ühendatakse LED -i negatiivne jalg 330 oomi takistiga. Takisti teine ots on ühendatud leivaplaadi maandusega, mis on ühendatud Arduino maandusega. Korrake seda kõigi kolme LED -i puhul. Meie prototüübis on sinine LED ühendatud Y-tasapinnaga, punane LED Z-tasapinnaga ja roheline LED X-tasapinnaga. Kleepige LED -id vastavatele tasapindadele, et saada prototüübi kasutamisel otsest tagasisidet.
Kui te ei kasuta leivaplaati ja soovite varjestuskaabli otse Arduinoga ühendada, näete lisatud pilti, et saada kena ülevaade jootmisühendustest. Teie viimased ühendused peaksid välja nägema üldpildina.
Samm: kodeerimine
Manusesse paigutasime selle katse jaoks kasutatud koodi. Lisateabe saamiseks lisatakse pärast iga peamist käsku kommentaar, mis selgitab koodis toimuvat. Avage kood oma arvutis Arduino tarkvaras ja laadige see oma Arduino. Kui kasutate sülearvutit, veenduge, et seda laetakse; muidu teie prototüüp ei tööta.
6. samm: prototüübi kasutamine
See 3D -liikumise jälgimise viis on ümbritsevate muutujate suhtes väga tundlik. Seetõttu kalibreerige kindlasti koodis olevad väärtused vastavalt teie olukorrale. Õigete väärtuste saamiseks võite lihtsalt kasutada jadamonitori. Näpunäide: saate ise kalibreerida, kus see võtab koodi käivitamisel keskmised väärtused + 10 %. Videos näidatakse, kuidas prototüüp peaks õigesti töötama.
Soovitan:
Mahtuvusliku sõrmejäljeanduri liides Arduino UNO -ga: 7 sammu

Mahtuvusliku sõrmejäljeanduri liides Arduino UNO -ga: Hei, mis toimub, poisid! Akarsh siin CETechist. Täna lisame oma projektidele kaitsekihi. Ärge muretsege, me ei kavatse ametisse määrata ihukaitsjaid. See on armas väike nägus sõrmejäljeandur DFRobotilt. Nii
Väikeste poodide jälgimine ja jälgimine: 9 sammu (piltidega)
")
Jälgi ja jälgi väikestele poodidele: see on süsteem, mis on loodud väikestele kauplustele, mis peaksid olema paigaldatud e-jalgratastele või e-motorolleritele lühikese vahemaaga kohaletoimetamiseks, näiteks pagaritöökoda, mis soovib saiakesi tarnida. Mida tähendab jälgimine ja jälgimine? Jälgimine ja jälgimine on süsteem, mida kasutavad ca
IoT on lihtne: mitme anduri jälgimine: 7 sammu

IoT Made Simple: mitme anduri jälgimine: mõned nädalad tagasi avaldasin siin õpetuse temperatuuri jälgimise kohta, kasutades DS18B20-digitaalandurit, mis suhtleb 1-juhtmelise siini kaudu, saates andmeid Interneti kaudu koos NodeMCU ja Blynk abil: IoT Made Simple : Temperatuuri jälgimine kõikjalBu
Anduri väärtuse reaalajas jälgimine kõikjal maailmas: 4 sammu

Anduri väärtuse reaalajas jälgimine kõikjalt maailmast: sain sõnumi tehnikute WhatsAppi numbri kohta, mis puudutas abi ühe projekti tegemisel. Projekt pidi mõõtma rõhuandurile avaldatavat survet ja kuvama selle nutitelefonis. Nii aitasin seda projekti teha ja otsustasin teha juhendaja
Mahtuvusliku vedelikuanduri ehitamine: 8 sammu (piltidega)
")
Mahtuvusliku vedelikuanduri loomine: Mahtuvusliku vedeliku sponsor tugineb asjaolule, et kahe metallplaadi vaheline mahtuvus või laeng muutub (antud juhul suureneb) sõltuvalt sellest, milline materjal nende vahel on. See võimaldab meil c