: 8 sammu (koos piltidega)")
Sisukord:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 08:49.
- Viimati modifitseeritud 2025-01-23 14:40.


Tere kõigile, Kõik see algas lihtsa XY -plotteri tegemisega pärast selle edukat lõpuleviimist, mõtlesin välja töötada lihtsa kõne punktkirja teksti muunduriks. Hakkasin seda Internetist otsima ja ootamatult olid hinnad liiga kõrged, mis aitas mul ehitada väikese kaasaskantava ja odava kirjaniku.
Kuna me teame, et mida iganes me arvame ehitada, võib see olemas olla või vähemalt keegi seda proovida, siis hakkasin otsima sellist kirjutusmasinat. Sain video, kus see oli üsna suur ja mürarikas, nii et mõtlesin panna oma maitse mis on väike kaasaskantav ja hõlpsasti kasutatav.
Ausalt öeldes olen ma Arduino uus ja õpin seda endiselt. Ma suutsin edukalt ehitada XY plotteri, nii et minu lootused olid kõrged, sama teadmisega võin välja tõmmata oma väikese punktkirja kirjutaja. Nii et selles protsessis olen õppinud palju ja lõpuks suutsin selle välja töötada vaid 2 nädala jooksul.
Siit saate teada, kuidas lihtsat punktkirjanikku üles ehitada.
Samm: projekti materjalid
- Arduino Nano
- A4988 Stepper juht
- Bluetoothi jada transiiveri moodul
- CD -draivi samm -mootori liuguri lineaarne juhik mikro
- 2-osaline 360-kraadine pöörlev servomootor
- 1 tk 180-kraadine servomootor
- 2 tükki süstalt (meditsiinipoes)
- 1 tükk läbipaistvat akrüüllehte
- Kahepoolne vahtlint
- Fevi Kwik
- Isane-emane hüppaja
- Lõiketööriistad ja kruvikeerajate komplekt.
- Geel / pastapliiats
- Bluetooth -funktsiooniga mobiiltelefon
- APP: Arduino hääljuhtimine
Nüüd ehitame selle üles
-
Kogu projekti saab jagada 4 väikeseks osaks
- Vooderdusmooduli seadistamine (kasutades draiverit A4988)
- Kirjaniku pea üles -alla liikumise loomine
- Rull paberi rullimiseks
- Bluetoothi integreerimine
- Lõpuks peate kokku panema kõik osad, mis viivad projekti lõpule.
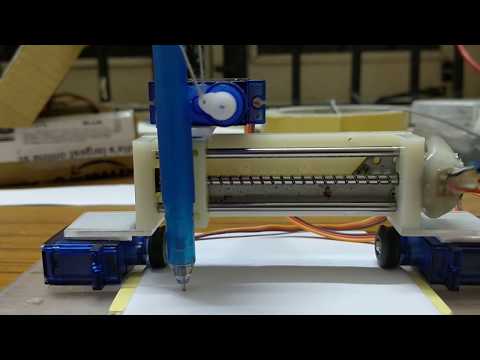
2. etapp: 1. osa: Liner Motion for Writeri loomine

Meil on vaja edasi -tagasi liigutusi, et asjad paberile kirjutada. Sellise mehaanilise liikumise loomiseks erinevate meetodite abil on palju videoid. Kuid samm -mootorit kasutades saame seda teha väga lihtsalt ja suure täpsusega.
Nii et mehaaniliste asjade loomise vältimiseks kasutasin liuguriga kaasasolevat samm -mootorit, saate selle ise ehitada, kui olete huvitatud oma ehitamisest, saate seda linki järgida.
Kui mehaaniline osa on tehtud, peame elektrilise konfiguratsiooni tegemiseks järgima samme
- Järgige skeemi konfigureerimise pilti.
-
Pange kindlasti
- Nõel 6: lubage
- Tihvt 5: samm
- Tihvt 4: suund
- Laadige oma Arduino nano -s üles basicMove2 kood ja avage jadamonitor ning kasutage edastamiseks "f" ja tagurpidi "" b "ning kontrollige oma vooluringi. Kontrollige, kas suudate saavutada õige lineaarse liikumise või mitte.
- Võite kasutada ka fbfbffbbfffbbb seeriaid nagu käsk.
3. samm: 2. osa: kirjutajapea (üles ja alla liikumine)
")
")
")
")
Üles ja alla liikumiseks on erinevaid viise. Seda saate teha solenoidi täiturmehhanismi abil. Kuid siin kasutan selleks lihtsat pliiatsit servomootori abil.
- Võtke mis tahes lihtne pastapliiats, millel on eemaldatav täidis.
- Pärast täitematerjali sisse surumist tehke selle ülaossa auk, veenduge, et auk peaks läbima pliiatsi mõlemat külge ja täitke see uuesti.
- Tehke täitmisse veel üks auk ja kinnitage sellele nöör.
- Pange täitematerjal tagasi ja tehke pastapliiatsisse täiteava alla auk, veenduge, et see oleks vähemalt 2-3 cm madalam kui kordus.
- Nüüd seo elastne kumm peale pliiatsi ja täida uuesti.
- Kasutage 180 -kraadist servomootorit ja seadke see 0 kraadile ning kinnitage nöör nobi külge.
- Nüüd, kui nob pöörleb vastupäeva 180, tõmmatakse täitematerjal välja ja kui see üleval oleva elastse riba tõttu 0 kraadi tagasi liigub, liigub see tagasi sisse.
- Kinnitage signaaltihvt Arduino nano tihvti number 8 külge.
- Laadige oma Arduino nano -s üles basicMove2 kood ja avage jadamonitor ning kasutage "n" ja testige oma vooluringi.
- Võite kasutada ka käsu nnnnnnnnn seeriaid ja kontrollida, kas see töötab või mitte.
- Sooviliikumise saamiseks suurendage pööramisnurga vähenemist.
4. samm: 3. osa: paberirull



Nüüd on paberrull, see on kõige huvitavam ja väljakutsuvam osa.
- Eemaldage süstlas kumm.
- Lõika plastist käik ringiks.
- Pange see kummi ja kandke natuke liimi.
- Kinnitage servo ja kinnitage see liimiga.
- Looge teine, nagu eespool.
- Kinnitage signaaltihvt Arduino nano tihvtidele 9 ja 10.
- Laadige oma Arduino nano -s üles basicMove2 kood ja avage jadamonitor ning kasutage "p" ja testige oma vooluringi.
- Võite kasutada ka käsu pppppppppp seeriat ja kontrollida, kas see töötab või mitte.
- Soovitud kiiruse saavutamiseks suurendage pööramisnurka.
- Proovige kiirust reguleerida, muutes servo sees olevat potentsiomeetrit.
- Pöörake samas suunas ja kiirusega (see on kõige olulisem ja tüütum töö).
5. samm: 4. osa: Bluetooth -mooduli integreerimine

See osa on kõige lihtsam.
- Tehke ülaltoodud skeemi konfiguratsioon ja see on tehtud.
- See aitab teil häälkäsklusi saata Arduino hääljuhtimise abil.
- Google'is saate otsida "Arduino Bluetooth-moodul hc-05", saate lahedaid näiteid.
6. samm: 5. osa: koguge kokku



Nüüd paneme kokku kõik neli osa.
- Puhastage leht.
- Lisage topeltlindi abil servomootor, nagu joonisel näidatud.
- Kinnitage täiendav plasttükk lineaarsele liugurile ja asetage see kahe servo peale.
- Pange see kindlasti paberrulliga paralleelselt.
- Nüüd kinnitage pliiatsi pea, veenduge, et see ei puudutaks pinda ja servo pöörlemisel peaks see lindile augu tegema.
- Kinnitage tihvt Arduino nano.
- Laadige oma Arduino nano -s üles basicMove2 kood.
-
Avage jadamonitor ja kontrollige kõiki käske
- f edastamiseks
- b tagasi
- p paberi rullimiseks
- n pliiatsi üles ja alla liigutamiseks.
- Kui kõik funktsioonid on nüüd kontrollitud, on see valmis punktkirja printimiseks.
Samm: tehke ahel kompaktseks




Voolutage pilti, et luua vooluring väikeses ja ühes leivaplaadis.
8. samm: printige punktkiri

- Avage fail Brallie.ino, avage Arduino IDE jadamonitor.
- Pange paber rullpaberi mootori alla.
- Saatke käsku ruumi, st ("") ja klõpsake sisestusklahvi.
- Paber libiseb sisse.
- Tehke seda seni, kuni see kirjaniku peast üle läheb.
- Seejärel saate monitorile saata oma käsu, tegeliku teksti.
- Avage Bluetooth -rakendus ja looge ühendus Bluetoothiga ning saatke häälkäsklus.
- pöörake paberit, et näha punktkirja keelt.
- Proovisin mõnda sõna, nagu tere, tere ja tere, näete väljundpaberi näidist.
-
Teile spetsiifiliste tulemuste saamiseks saate koodi allpool parameetreid muuta.
- Vahe punktkirja veergude vahel: int sammud = 30;
- Joonevahe punktkirja esimese kahe punkti ja kahe järgmise punkti vahel: int paperLine = 250;
- Lineaarse liuguri kiirus: int stepperDelay = 500;
- Kirjutuspea kiirus: int servodelay = 500;
- Märkide arv rea kohta: int n = 10;
Soovitan:
Mobiiliga juhitav Bluetooth -auto -- Lihtne -- Lihtne -- Hc-05 -- Mootorikilp: 10 sammu (koos piltidega)
")
Mobiiliga juhitav Bluetooth -auto || Lihtne || Lihtne || Hc-05 || Motor Shield: … Palun TELLI minu YouTube'i kanalile ………. See on Bluetooth-juhitav auto, mis kasutas mobiiliga suhtlemiseks Bluetooth-moodulit HC-05. Saame autot juhtida mobiiltelefoniga Bluetoothi kaudu. Auto liikumise juhtimiseks on olemas rakendus
ScanUp NFC lugeja/kirjutaja ja helisalvesti pimedatele, nägemispuudega inimestele ja muule: 4 sammu (piltidega)
")
ScanUp NFC lugeja/kirjutaja ja helisalvesti pimedatele, nägemispuudega inimestele ja kõigile teistele: Õpin tööstusdisaini ja projekt on minu semestri töö. Eesmärk on toetada nägemispuudega ja pimedaid inimesi seadmega, mis võimaldab salvestada heli WAV -vormingus SD -kaardile ja helistada sellele teabele NFC -märgendi abil. Nii aastal
Punktkirja astronoomia: 8 sammu (koos piltidega)
")
Braille'i astronoomia: tahtsin jagada astronoomia / astrofotograafia maailma pimedate ja halvasti nägevate inimestega. See projekt teeb seda lihtsal viisil, vähese varustusega ja odavalt
Odav punktkirja reljeef (La Picoreuse): 19 sammu (piltidega)
: 19 sammu (piltidega)")
Odav punktkirja reljeef (La Picoreuse): esitlus " La Picoreuse " on odav (75 eurot), lihtne ehitada A4 -tüüpi punktkirja embosser. Selle projekti eesmärk on olla esimene samm või mõtisklusalus teistele tegijatele, et pakkuda alternatiivi väga kallitele turutõukuritele
Hääljuhtimisega punktkirja tüüpi mustrisemafor: 4 sammu (piltidega)
")
Hääljuhtimisega punktkirja tüüpi mustrisemafor: "Lord Vetinari seisis oma akna juures ja vaatas teisel pool jõge asuvat semaforitorni. Kõik kaheksa tema poole suunatud suurt aknaluuki vilkusid raevukalt - must, valge, must, valge, must, valge … Teave lendas