")
Sisukord:
- Samm: vaadake, kuidas minu projekt töötab
- Samm: hankige kogu materjal
- Samm: laadige programm Arduino pardale üles
- 4. samm: asetage rajad ja tehke küljendus
- Samm: vooluahela skeem on alati kasulik
- 6. samm: ühendage pöörmed juhtplaadi L298N väljundiga
- Samm 7: ühendage toiteploki juhtplaadi L298N muu väljundiga
- Samm 8: ühendage L298N draiveriplaat Arduino plaadi pistikutega
- Samm: ühendage andur Arduino plaadiga
- Samm: ühendage mootorijuhi sisendpoldid Arduino plaadiga
- 11. samm: asetage rong rööbastele
- 12. samm: lülitage seadistus sisse
- 13. samm: see on VALMIS
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 08:46.
- Viimati modifitseeritud 2025-01-23 14:40.

Mudeli rongipaigutuste tegemine on suurepärane hobi, selle automatiseerimine muudab selle palju paremaks! Vaatame mõningaid selle automaatika eeliseid:
- Odav töö: kogu paigutust kontrollib Arduino mikrokontroller, kasutades L298N mootorijuhti, nende maksumus pole peaaegu midagi võrreldes traditsiooniliste rongijuhtimisseadmete ja jõuallikatega.
- Ideaalne kuvarile paigaldamiseks: Kuna paigutuse juhtimiseks ei ole vaja inimeste sekkumist, saate seda kasutada ekraanil, kus te ei saa rongi ja pöörete juhtimiseks alati kohal olla.
- Suurepärane mikrokontrollerite harrastajatele: kui olete või soovite alustada Arduino ja programmeerimisega, on see suurepärane projekt teie oskuste harjutamiseks.
Kui olete huvitatud, saate vaadata ka selle projekti eelmist versiooni, mis on veelgi lihtsam.
Niisiis, ilma pikema jututa alustame!
Samm: vaadake, kuidas minu projekt töötab


Samm: hankige kogu materjal

Alustamiseks veenduge, et teil on kõik järgmised võimalused.
- Eelistatud on Arduino mikrokontrolleri plaat, UNO.
- L298N kahekordse H-silla mootoriga juhtplaat.
- 6 isast kuni isasesse hüppaja juhtmest.
- 7 isast naissoost džemprijuhet.
- Kruvikeeraja.
- 12 V alalisvoolu toiteadapter.
- Rajaosa, mille alumisel küljel on IR lähedusandur (kasutasin Kato S62 rada)
Samm: laadige programm Arduino pardale üles
Laadige Arduino IDE siit alla, kui teil seda arvutis pole. Seejärel laadige alla ja avage antud fail.
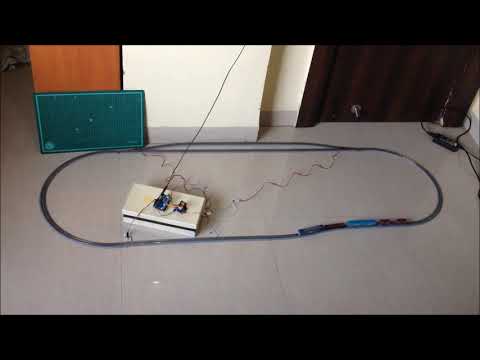
4. samm: asetage rajad ja tehke küljendus

Tehke mööduva voodriga ovaalne silmus mõnevõrra, nagu ülal näidatud. Veenduge, et kaugus anduritee ja esimese rööbastee vahel, mis rong pärast anduriraja ületamist ületab, on suurem kui rongi pikkus, nii et ükski rongi osa ei ületaks pööret.
Samm: vooluahela skeem on alati kasulik

Täisvaate saamiseks klõpsake pilti. Enne jätkamist kontrollige kindlasti kogu vooluringi skeemi ja kõiki üksikasju.
6. samm: ühendage pöörmed juhtplaadi L298N väljundiga




Ühendage mõlema pöörde punane ja must juhtmed üksteisega, mille tulemuseks on paralleelühendus. Seejärel ühendage punased juhtmed väljundiga out4 ja mustad juhtmed mootori juhtplaadi väljundiga.
Samm 7: ühendage toiteploki juhtplaadi L298N muu väljundiga


Ühendage toiteploki valge juhe väljundiga1 ja sinine juhe mootori juhtplaadi väljundiga 2.
Samm 8: ühendage L298N draiveriplaat Arduino plaadi pistikutega

Ühendage 12-voldine tihvt Arduino plaadi VIN-tihvtiga, GND-tihvt Arduino-plaadi GND-tihvtiga ja eelistatavalt mootorijuhi 5-voldine tihvt Arduino-plaadi 5-voldise tihvtiga.
Samm: ühendage andur Arduino plaadiga

Ühendage anduri VCC tihvt Arduino plaadi 5-voldise tihvtiga, GND-tihvt Arduino-plaadi GND-tihvtiga ja OUT-tihvt Arduino-plaadi A0-tihvtiga.
Samm: ühendage mootorijuhi sisendpoldid Arduino plaadiga

Ühendage Arduino plaadi digitaalsed tihvtid mootori juhtplaadi sisendpistikutega järgmiselt.
- D9 kuni IN1
- D10 kuni IN2
- D11 kuni IN3
- D12 kuni IN4
11. samm: asetage rong rööbastele

Pärast kõigi juhtmestikuühenduste kontrollimist asetage rong voodrile.
12. samm: lülitage seadistus sisse

Lülitage seadistus sisse ja veenduge, et pöörangud lülitatakse voodrile, kui mitte, siis lihtsalt pöörake mootorijuhiga tehtud pöörete ühendused ümber. Samuti veenduge, et rong hakkaks edasi liikuma. Kui rong liigub vales suunas, pöörake sööturraja ühendus mootorijuhiga ümber.
13. samm: see on VALMIS
Projekt on praegu valmis. Paigutuse funktsionaalsuse muutmiseks, kõrvalteede lisamiseks võite Arduino koodi abil nokitseda, see on kõik kohandatav! Tahaksin teada kõikidest selle projekti muudatustest, andke mulle sellest allpool kommentaarides teada. Kõike paremat!
Soovitan:
Lihtne automatiseeritud punkt -raudtee mudelraudtee: 10 sammu (piltidega)
")
Lihtne automatiseeritud punkt -raudtee mudelraudtee: Arduino mikrokontrollerid sobivad suurepäraselt raudteemudelite paigutuse automatiseerimiseks. Paigutuste automatiseerimine on kasulik mitmel otstarbel, näiteks paigutuse paigutamisel kuvarile, kus paigutustoimingu saab programmeerida rongide automaatseks käitamiseks. L
Raudtee automaatne skeem, mis sõidab kahe rongiga (V2.0) - Arduino baasil: 15 sammu (piltidega)
 - Arduino baasil: 15 sammu (piltidega)")
Raudtee automaatne skeem, mis sõidab kahe rongiga (V2.0) | Arduino baasil: Raudteemudelite paigutuse automatiseerimine Arduino mikrokontrollerite abil on suurepärane võimalus ühendada mikrokontrollerid, programmeerimine ja mudeli raudtee ühendamine üheks hobiks. Saadaval on hulk projekte rongi iseseisva sõitmise kohta raudteemudelil
Raudtee mudelipaigutus automaatse möödasõiduteega (V2.0): 13 sammu (piltidega)
: 13 sammu (piltidega)")
Raudtee mudelipaigutus automaatse möödasõiduteega (V2.0): see projekt on uuendus ühest varasemast raudteeautomaatika mudelprojektist, mudelraudtee paigutus koos automaatse voodriga. See versioon lisab veduri ja veeremiga ühendamise ja lahtiühendamise funktsiooni. Operatsioon
Lihtne automatiseeritud raudteesilm koos õue voodriga: 11 sammu

Lihtne automatiseeritud raudteesilm koos õuevoodriga: see projekt on ühe minu eelmise projekti täiendatud versioon. See kasutab raudtee mudeli paigutuse automatiseerimiseks Arduino mikrokontrollerit, suurepärast avatud lähtekoodiga prototüüpimisplatvormi. Paigutus koosneb lihtsast ovaalsest silmusest ja õue voodrikliidest
Automaatne punkt -punkti mudelraudtee koos õue voodriga: 10 sammu (piltidega)
")
Automaatne punkt -punkti mudelraudtee koos õuevoodriga: Arduino mikrokontrollerid avavad suurepäraseid võimalusi raudteemudelites, eriti kui tegemist on automaatikaga. See projekt on sellise rakenduse näide. See on jätkuks ühele eelnevale projektile. See projekt koosneb punktist