")
Sisukord:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 08:48.
- Viimati modifitseeritud 2025-01-23 14:40.



See juhend on mõeldud põhilise valgustugevuse mõõturi valmistamiseks ilma Arduino või mõne muu mikrokontrolleri või programmeerimiseta. Valgustugevuse mõõtur kuvab erinevaid valgustugevuse tasemeid erinevate LED -de värvidega. Punane LED näitab normaalset valgust, punane ja kollane LED näitavad suurt intensiivsust ning roheline koos punase ja kollasega näitab väga suurt intensiivsust. See on algajatele mõeldud projekt ning nõuab väga elementaarseid teadmisi ja oskusi elektroonikast ja jootmisest. See vooluring on täiesti originaalne ja minu disainitud.
Valgustugevuse mõõturit saab selle väiksuse tõttu paigaldada kõikjale. Paigaldage see oma tuppa või aeda või hoidke seda lihtsalt oma õppelaual.
Samm: video

Enne edasiliikumist saate videot vaadata. See näitab prototüübi tööd ja valmistamise protsessi.
Samm: nõutav materjal


Selle projekti tegemiseks on vaja väga lihtsaid elektroonilisi komponente ja osi. ELEKTROONILISED KOMPONENDID- LDR X1- LED-id X3 (punane, kollane ja roheline. Igaüks üks) -100 oomi takisti X1-47 oomi takisti X1 MUUD OSAD juhtmed- hüppaja juhtmed (isasest naissoost)- perforeeritud trükkplaadid- traadi koorija- jootekolb- jootetraat
3. samm: proovimine, viga ja testimine



Ideaalse tulemuse ja takistuse kombinatsiooni saamiseks testiti paljusid erinevaid takistite väärtusi ükskõiksete valgustingimuste korral. Takisti väärtused valiti ka, võttes arvesse iga erineva värvi LED -i takistuse erinevust. Täheldati, et punase LED -i vastupanu oli kõige väiksem, samas kui kollase LED -i vastupanu oli kõige suurem, mõjutades seega LED -ide ja takistite järjekorra valikut.
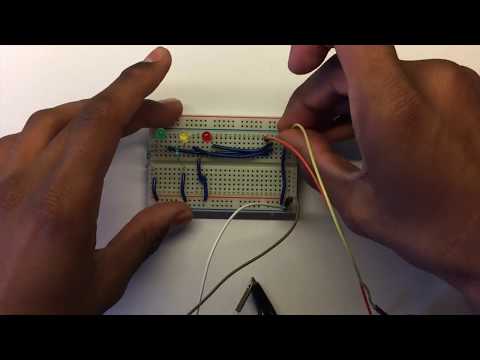
Samm: prototüübi valmistamine leivaplaadil



Prototüübi tegemiseks järgige piltidel olevat videot ja vooluringi.
Samm: trükkplaadi valmistamine ja jootmine



Kui soovite vooluahela püsivaks muuta, alustage piltide järgi komponentide jootmist. Kõigepealt asetage LED -id ja jootke need koos takistitega. Roheline peaks olema joodetud 100 oomi takisti külge ja kollane joodetud 47 oomi takisti külge.
6. samm: kast



Karbi valmistamiseks olen kasutanud 4mm paksust EVA lehte. Kõik tükid ühendatakse kummist liimiga. Karbi mõõtmed on järgmised:
Mõõtmed 6X4,5X3,5 cm.
Soovitan:
Stopper ilma programmeerimiseta: 5 sammu

Stopp ilma programmeerimiseta: Hei poisid, kõigile algajatele on siin lahe projekt, mille saate luua ilma programmeerimiseta. See on lihtne ja ka kulutõhus. Enne alustamist vaatame osade loendit: kasutatud IC-d: 1) 555 taimer- x12) CD 4081BE (JA g
AVR mikrokontroller. Impulsi laiuse modulatsioon. Alalisvoolumootori ja LED -valgustugevuse regulaator: 6 sammu

AVR mikrokontroller. Impulsi laiuse modulatsioon. Alalisvoolumootori ja LED -valgustugevuse regulaator .: Tere kõigile! Impulsi laiuse modulatsioon (PWM) on telekommunikatsiooni ja toitejuhtimise väga levinud tehnika. Seda kasutatakse tavaliselt elektriseadme toite juhtimiseks, olgu see siis mootor, LED, kõlarid jne. Põhimõtteliselt on see moodul
Kuidas teha mobiiliga juhitavat robotit DTMF -põhine - Ilma mikrokontrollerita ja programmeerimiseta - Juhtimine kõikjal maailmas - RoboGeeks: 15 sammu

Kuidas teha mobiiliga juhitavat robotit DTMF -põhine | Ilma mikrokontrollerita ja programmeerimiseta | Juhtimine kõikjal maailmas | RoboGeeks: Tahad teha roboti, mida saab juhtida kõikjalt maailmast, teeme ära
Animeeritud LED -märgitahvel ilma programmeerimiseta: 3 sammu

Animeeritud LED -märgitahvel ilma programmeerimiseta: see on elektrooniline projekt ilma programmeerimiseta või igasuguste mikrojuhtimisseadmeteta. Saate selle projekti abil luua oma kohandatud sõna juhitud laululaua. Selle projekti jaoks olen animatsiooniks kasutanud nihketakistust IC 74ls164 ja IC 555 saate teha led -tahvli
Navigeerige robot kingade anduritega, ilma GPS -iga, ilma kaardita: 13 sammu (koos piltidega)
")
Navigeerige robotil jalatsianduritega, ilma GPS-i, ilma kaardita: robot liigub eelnevalt programmeeritud teel ja edastab (üle Bluetoothi) oma tegeliku liikumisteabe telefoni reaalajas jälgimiseks. Arduino on eelnevalt programmeeritud teega ja oblu kasutatakse roboti liikumise tuvastamiseks. oblu edastab liikumisteavet