")
Sisukord:
- 1. samm: kuidas see toimib
- 2. samm: pange tähele enne alustamist
- Samm: koguge kogu materjal
- 4. samm: erinevad mõõtmed
- Samm: keha valmistamine
- 6. samm: täiturmehhanismi kokkupanek ja plaatide valmistamine
- 7. samm: laineomaduste käsitlemine
- 8. samm: elektroonilised ühendused ja programm
- 9. samm: ajamite juhtimine menüüpõhise programmi abil
- Samm 10: Kuidas Wave Tankit kasutada
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 08:49.
- Viimati modifitseeritud 2025-01-23 14:40.



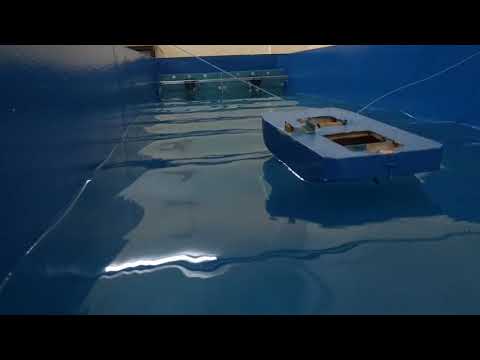
Lainepaak on laboratoorne seade pinnalainete käitumise jälgimiseks. Tüüpiline lainepaak on kast, mis on täidetud vedelikuga, tavaliselt veega, jättes selle peale lahtise või õhuga täidetud ruumi. Paagi ühes otsas tekitab ajam laineid; teine ots on tavaliselt lainet neelava pinnaga.
Tavaliselt maksavad need mahutid palju raha, nii et proovisin teha tõeliselt odava lahenduse õpilastele, kes soovivad tanki kasutada oma projektide testimiseks.
1. samm: kuidas see toimib
Seega koosneb projekt kahest täiturmehhanismist, mis on valmistatud v-piluga alumiiniumist väljapressimisega.
Iga täiturmehhanismiga on ühendatud samm -mootor ja mõlemat mootorit juhib sama samm -mootoriga ajam, nii et viivitust pole.
Arduino kasutatakse mootori juhi juhtimiseks. Menüüpõhist programmi kasutatakse arvuti kaudu ühendatud arduionile sisendi andmiseks. Täiturmehhanismi plaadid on paigaldatud v-pesa portaalile, mis liigub edasi ja tagasi, kui mootorid käivituvad ja see plaatide edasi-tagasi liikumine tekitab paagi sees laineid. Lainekõrgust ja lainepikkust saab muuta, muutes kiirust mootor arduino kaudu.
2. samm: pange tähele enne alustamist

Ma ei ole käsitlenud enamikku väikestest asjadest, kuidas kasutada arduino või kuidas keevitada, et see õpetus oleks väike ja kergesti mõistetav. Enamik puuduvaid asju kustutatakse piltidelt ja videotelt. Palun saatke mulle sõnum, kui projektiga on probleeme või küsimusi.
Samm: koguge kogu materjal
- Arduino mikrokontroll
- 2*samm -mootor (2,8 kg cm pöördemoment mootori kohta)
- 1*Sammumootori juht
- 2*V pesa portaalisüsteem
- Terasest või rauast plaadid paagi korpuse jaoks
- L-kangendid keha toetamiseks
- Kiud- või plastleht täiturplaadi valmistamiseks
- Juhtmed 48 V alalisvoolu toiteallikas
Ma ei ole lisanud v-pesa portaali materjale, sest nimekiri on väga suur, siis lihtsalt google v-pesa kaudu saate palju videoid selle kokkupaneku kohta, ma kasutasin 2040 alumiiniumist väljapressimist. Mootori võimsus ja toiteallika võimsus muutuvad, kui soovite rohkem koormust kanda.
Paagi mõõtmed
Pikkus 5,50 m
Laius 1,07 m
Sügavus 0,50 m
4. samm: erinevad mõõtmed



Asjade lihtsustamiseks ja õpetuse lühendamiseks olen pildistanud erinevaid komponente skaalaga, nii et näete nende suurusi.
Samm: keha valmistamine




Korpus on valmistatud 3 mm paksusest malmist lehest.
Paagi laius on 1,10 meetrit, pikkus 5 meetrit ja kõrgus 0,5 meetrit.
Paagi korpus on valmistatud pehmest terasest, mille ümber on vajadusel jäigastid. Kerged terasplaadid painutati ja lõigati vastavalt paagi mõõtmetele erinevateks osadeks. Need osad püstitati seejärel kokku keevitades. Konstruktsiooni tugevamaks muutmiseks keevitati kokku ka jäigastid.
Esimene plaat painutati erinevates osades soovitud suuruseks ja seejärel keevitati need osad kere püstitamiseks kokku. Jäigastid lisati tugikangide mõõtmed on näidatud pildil
6. samm: täiturmehhanismi kokkupanek ja plaatide valmistamine



täiturmehhanismid on valmistatud v-pesadega süsteemidest. Need on tõesti odavad ja hõlpsasti ehitatavad. Saate ühest neist kokku panna. Võrgu kaudu googeldades. Olen kandevõime suurendamiseks kasutanud rihmülekande asemel pliidikruvi. Ma ei ole montaažiõpetust lisanud, sest see muutub vastavalt koormusele, mida soovite kanda. Minu jaoks oli koormus maksimaalse kiirusega umbes 14 kg.
Täiturmehhanismi plaat on valmistatud frp -lehest, võib kasutada ka akrüüli. Frp -lehe toetamiseks ehitati roostevabast terasest raam.
Aeru raam
Aeru raam on valmistatud roostevabast terasest. Roostevaba teras on veekindel ja seega korrosioonikindel. Aeru raami jaoks kasutati ruudukujulist osa 2 x 2 cm. Tugev raam oli vajalik, kuna laine tekitamisel mõjub mõlale palju tsüklilist koormust. Terasraam ei paindu ja tekitab seega tavalise siinuslaine.
Täiturmehhanismi plaadi ja portaarplaadi ühendamiseks vsloti süsteemis valmistati kohandatud L-klamber.
7. samm: laineomaduste käsitlemine



Paak võib vastavalt vajadusele tekitada erineva lainekõrguse. Erineva lainekõrguse tekitamiseks reguleeritakse mootori pöördeid. Suure lainekõrguse saamiseks suurendatakse mootori pöörlemiskiirust ja vähendatakse ka laine lainepikkust. Sarnaselt mootori lainepikkuse pöörete arvu suurendamisele vähendatakse. Pöörete arvu saab reguleerida, valides menüüst kohandatud pöörete arvu.
Maksimaalne pöörete arv = 250
Minimaalne pöörete arv = 50
Allpool on näide kiirendusmõõturiga registreeritud erineva lainekõrguse kohta. Esimene pilt on kõrgel pööretel salvestatud andmed, mille tulemuseks on kõrge lainekõrgus. Teine pilt näitab graafiku vähenenud lainekõrgust ja suurenenud lainepikkust, mis on kiirendusmuunduri poolt salvestatud andmed ja kujutavad genereeritud laine tegelikke laineomadusi.
8. samm: elektroonilised ühendused ja programm

Toiteallika ühendamisel olge ettevaatlik, ühendades polaarsusega positiivse klemmi positiivse ja negatiivse negatiivse külge. Tehke mootori ja juhi ühendused, nagu pildil näidatud. Kui kõik ühendused on korras, ühendage mikrokontrolleri tihvtid (8, 9, 10 ja 11)) samm -mootoriga juhile. Ühendage mikrokontroller arvutiga USB kaudu. Käivitage Arduino IDE> Seeriamonitor.
Programm sisaldab õpetust ja on iseenesestmõistetav, kuna see kasutab lülitit ja muid avaldusi. See on tõesti lihtne, ka keskkooliõpilane saab sellest aru.
Siin on Google'i draivi link programmile
Arduino juhtimisprogramm
9. samm: ajamite juhtimine menüüpõhise programmi abil

Kui mikrokontroller on arvutiga korralikult ühendatud, kuvatakse sarnane menüü. Valiku valimiseks sisestage lihtsalt selle kõrval olev number ja vajutage sisestusklahvi
Näide:-
„Maksimaalse sagedusega käivitamine” valimiseks tippige 1 ja vajutage sisestusklahvi.
Toimingu peatamiseks tippige 0 ja vajutage sisestusklahvi.
Hädaseiskamine
Täiturmehhanismi peatamiseks vajutage nulli “0” ja sisestage.
Hädaseiskamiseks vajutage mikrokontrolleri lähtestamise nuppu või katkestage toide.
Samm 10: Kuidas Wave Tankit kasutada

See tank tehti osana minu suurprojektist. Tank on testitud erinevate regulaarsete lainete tekitamiseks peamere seisundis skaleeritud praamimudeli jaoks. Lainevoolu testimine õnnestus. Selle projekti arendamise kogumaksumus oli Rs. 81 000 (ainult kaheksakümmend tuhat) kahe kuu jooksul.
Kõigi küsimuste korral palun kommenteerige.

Esimene auhind veekonkursil
Soovitan:
Kuidas teha drooni Arduino UNO abil - Mikrokontrolleri abil kvadkopteri valmistamine: 8 sammu (piltidega)
")
Kuidas teha drooni Arduino UNO abil | Valmistage mikrokontrolleri abil kvadropter: Sissejuhatus Külastage minu Youtube'i kanalit Droon on ostmiseks väga kallis vidin (toode). Selles postituses arutlen, kuidas seda odavalt teha ?? Ja kuidas saate oma odava hinnaga sellist teha … No Indias kõik materjalid (mootorid, ESC -d
Kella tegemine M5stick C abil Arduino IDE abil RTC reaalajas kell M5stack M5stick-C abil: 4 sammu

Kella tegemine M5stick C abil, kasutades Arduino IDE | RTC reaalajas kell koos M5stack M5stick-C-ga: Tere, selles juhendis olevad poisid, me õpime, kuidas Arduino IDE abil kella m5stick-C arendusplaadiga teha. Nii kuvab m5stick kuupäeva, kellaaja ja amp; kuunädal ekraanil
Mozilla IoT lüüs ESP8266 ja Z-Wave abil: 7 sammu

Mozilla IoT-lüüs ESP8266 ja Z-Wave abil: jõudu rahvastele! Mozilla soovib IoT -protokolli tasuta teha. Selle projekti eesmärk on tagada, et Internet on ülemaailmne avalik ressurss, mis on kõigile avatud ja kättesaadav. Asjade Internet (IoT) on Interneti uus ajastu. Ja nagu praktikant
Mootori pöörete arvu autonoomne juhtimine tagasiside süsteemi abil IR -põhise tahhomeetri abil: 5 sammu (piltidega)
")
Mootori pöörlemiskiiruste autonoomne juhtimine tagasisidesüsteemi abil IR -põhise tahhomeetri abil: alati on vaja automatiseerida protsess, olgu see siis lihtne/koletu. Mul tekkis idee seda projekti teha lihtsast väljakutsest, millega silmitsi seistes leidsin meetodid meie väikese maatüki kastmiseks/niisutamiseks. Praeguse toiteliini puudumise probleem
Superlihtne arvuti juhtimine 110 Vac abil Crydom Solid-State Relay abil: 3 sammu (koos piltidega)
")
Superlihtne arvuti juhtimine 110 Vac abil Crydom Solid-State Relay abil: valmistun proovima oma kätt kuumutusplaadi jootmisel. Seetõttu vajasin ma 110Vac juhtimist arvutist. See juhend näitab, kuidas 110Vac hõlpsalt arvuti jadaväljundpordist juhtida. Minu kasutatav jadaport oli USB -tüüpi