
Sisukord:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 08:48.
- Viimati modifitseeritud 2025-01-23 14:40.

Mõni aeg tagasi postitasin oma Wifi PPM -kontrolleri. See töötab päris hästi. Vahemik on lihtsalt natuke lühike. Leidsin sellele probleemile lahenduse. ESP8266 toetab režiimi nimega ESPNOW. See režiim on palju madalamal tasemel. See ei kaota ühendust nii lihtsalt ja kui ühendus katkeb, ühendatakse see kohe uuesti.
Kasutan kolme ESP8266. Üks on ESPNOW vastuvõtja, teine ESPNOW saatja ja kolmas on pääsupunkt, millega saate ühenduse luua. Kolmas on vajalik, sest ESPNOW saatja ei saa samal ajal olla juurdepääsupunkt. Lisasin ka mõned antennid, et saada parem vahemik.
Otse vastuvõtja juures on teine pääsupunkt. Sellega ühenduse loomisel on teil sama, mis vana WifiPPM -projekti puhul.
Lisasin ka MSP protokolli vastuvõtja toe. See on "MultiWii jadaprotokoll", mida toetavad MultiWii, Betaflight, Cleanflight ja paljud teised lennujuhid.
Samm: osade loend




Teil on vaja kolme ESP8266 moodulit. Kuid soovite parimat valikut. Seega soovitan kasutada ESP8266 mooduleid koos antennidega. See töötab ka ilma antennita. Kasutan järgmisi osi:
2 x ESP07 (ESP8266 moodul antenni pistikuga)
1 x ESP12
1 x 3dBi mini-antenn I-PEX U. FL IPX vastuvõtja poolel
1 x ESP8266 2, 4 /5 GHz 3dbi Wlan Wifi antenn SMA Stecker / isane + I-PEX-adapter saatja poolel
3, 3 V toiteallikas kõikidele ESP8266 moodulitele
Teil on vaja ka arvutit, millel on Arduino IDE: https://www.arduino.cc/en/Main/SoftwareESP8266 Arduino IDE tugi. Järgige neid juhiseid: https://learn.sparkfun.com/tutorials/esp8266-thin… Arduino veebipõhine teek:
Samm: laadige sketšid alla ja välgutage



Visandeid saate alla laadida siit.
Pakkige fail lahti. Seal on kolm kausta: Master-AP, Sender, Receiver
Master-AP: see on pääsupunkti visand. Avage visand arduino IDE abil. Seadistage tööriistade menüüs protsessori sageduseks 160 MHz ja laadige eskiis üles ESP12 -sse.
Saatja: See on MSPNOW saatja visand. Seadistage protsessori sageduseks 160 MHz ja laadige see ühte ESP07 -st.
Esimesel pildil näete, kuidas ühendada ESP8266 moodul vilkumiseks.
Nüüd ühendage ESP12 (pääsupunkt) ja saatja ESP07 jadapordid ning toiteühendused (teine pilt): ESP12 VCC -> ESP07 VCCESP12 GND -> ESP07 GNDESP12 TX -> ESP07 RXESP12 RX -> ESP07 TX
Käivitage mõlemad moodulid ja looge ühendus pääsupunktiga "Pikamaa-WifiPPM/MSP". Parool on "WifiPPM/MSP"
Avage brauser ja avage IP -aadress 192.168.4.1. Ilmub juhtimise veebisait. Klõpsake nuppu "Wifi teave". Ilmub sõnumikast saatja MAC ja vastuvõtja MAC -iga.
Avage vastuvõtja visand Arduino IDE -s. Muutke rida "uint8_t sendermac = {0x5C, 0xCF, 0x7F, 0x77, 0xAB, 0xA6};" (kolmas pilt) saatja Maci aadressile, mis kuvatakse veebisaidil. Vastuvõtja Mac peaks olema korras. Veenduge, et protsessori sageduseks on seatud 160 MHz, ja laadige visand üles teisele ESP05 -le.
Samm: ühendage vastuvõtja lennujuhtimisega ja seadistage Cleanflight



Ühendage vastuvõtja lennujuhiga. Lennukontrolleril peaks olema 3, 3 -voldine väljund vähemalt 200 mA. Kui ei, vajate täiendavat 3, 3 V pingeregulaatorit.
Ühendage ESP GND lennujuhi GND -ga. Ühendage ESP VCC 3, 3 V lennujuhiga või täiendava 3, 3 V pingeregulaatoriga.
Võite kasutada PPM -väljundit või MSP -jadaväljundit.
MSP väljundi jaoks ühendage ESP8266 TX oma lennujuhi mis tahes jadaporti RX -iga. (Pilt 1)
PPM -väljundi jaoks ühendage ESP8266 GPIO5 lennukontrolleri PPM -sisendiga. (Pilt 1)
Pärast ESP ühendamist käivitage lennujuht ja avage puhas lend. Ühendage oma mobiiltelefoniga pääsupunktiga „WifiPPM/MSP”. Parool on "WifiPPM/MSP"
MSP puhul: avage vahekaart pordid ja määrake MSP jadapordile, millega ühendasite ESP8266 (joonis 2). Salvestage ja taaskäivitage. Minge vahekaardile konfiguratsioon ja seadke vastuvõtja asendisse "MSP jada vastuvõtja" (joonis 3). Salvestage ja taaskäivitage.
PPM -i jaoks: lugege oma lennujuhi käsiraamatust, kuidas seadistada PPMGo seadete vahekaardile ja seadistada vastuvõtja asendisse "PPM -vastuvõtja" (joonis 4). Salvestage ja taaskäivitage.
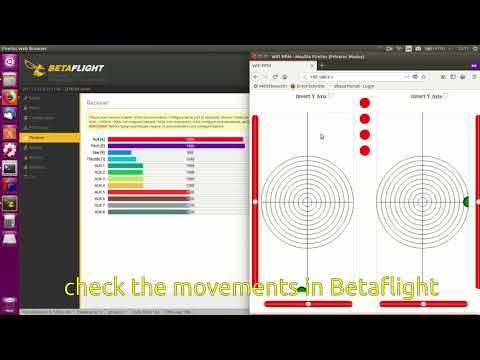
Järgmine seadistus on mõlema vastuvõtja jaoks sama: minge vastuvõtja vahelehele. Valige kanaliteks "RTAE1234" (pilt 5/video). Salvestage seadistus.
Nüüd avage oma nutitelefonis brauser. Avage sait 192.168.4.1 (joonis 6). Nüüd saate kontrollerit kontrollida.
Kui see töötab, käivitage kaks saatjat ESP8266. Ühendage pääsupunktiga „Pikaajaline WifiPPM/MSP”. Parool on "WifiPPM/MSP". Avage uuesti veebisait 192.168.4.1. Kontrollige uuesti cleanflightis, kas see töötab.
Ühendage antennid ESP07 moodulitega.
Samm: lisateave

Tavalises töös on kaks pöörduspunkti. Pöörduspunkt "WifiPPM/MSP" on nagu eelmine WifiPPM -projekt. Saate seda kasutada, kui soovite lihtsalt teha kiire lennu ilma lisamooduleid ühendamata, kui te ei vaja kaugühendust. Kui loote ühenduse kaugpuldiga WifiPPM/MSP, võtab kaugjuhtimispult kontrolli.
Võib -olla soovite teada, kui pikk on "kaugmaa". Tegelikult ma tõesti ei tea. See on vähemalt paarsada meetrit. Kuid ma ei saanud seda seni testida. See ei kaota ühendust minu täielikus korteris.
Lisasin MSP juhtimise, kuna arvasin, et saaksin telemeetriaandmete jaoks tagakanali luua. Kuid see ei töötanud kunagi stabiilselt. Igatahes on MSP protokoll täpsem kui ppm, sest see ei sõltu ajastusest nii palju. Võib -olla tekitab see probleeme aeglaste lennujuhtidega, sest jadaportis on tihe liiklus. Minu Noxe F4 lennujuhiga töötab see probleemideta.
Kui teil on konfiguratsiooniprobleeme, vaadake vana WifiPPM -i projekti.
Soovitan:
IoT-Ubidots-ESP32+pikaajaline traadita vibratsiooni- ja temperatuuriandur: 7 sammu

IoT-Ubidots-ESP32+kaugjuhtimispuldi vibratsiooni ja temperatuuri andur: vibratsioon on tõepoolest mootoriga seadmete vidinate masinate ja komponentide edasi-tagasi liikumine või võnkumine. Vibratsioon tööstussüsteemis võib olla probleemide sümptom või motiiv või seostada igapäevase kasutamisega. Näiteks osci
IoT-ThingSpeak-ESP32-pikaajaline traadita vibratsioon ja temperatuur: 6 sammu

IoT-ThingSpeak-ESP32-kaug-traadita vibratsioon ja temperatuur: Selles projektis mõõdame vibratsiooni ja temperatuuri, kasutades NCD vibratsiooni- ja temperatuuriandureid, Esp32, ThingSpeak. Vibratsioon on tõepoolest edasi-tagasi liikumine-või võnkumine - mootoriga seadmete vidinad ja masinad. Vibratsioon seadmes
IoT pikaajaline traadita temperatuuri ja niiskuse anduri andmete saatmine Google'i lehele: 39 sammu

IoT pika vahemiku traadita temperatuuri ja niiskuse anduri andmete saatmine Google'i lehele: me kasutame siin NCD temperatuuri ja niiskuse andurit, kuid sammud jäävad kõigi ncd -toodete jaoks võrdseks, nii et kui teil on muid ncd traadita andureid, vaadake neid tasuta kõrvalt. Selle teksti peatamise abil peate
Pikaajaline traadita veetaseme indikaator koos häirega - Vahemik kuni 1 km - Seitse taset: 7 sammu

Pikaajaline traadita veetaseme indikaator koos häirega | Vahemik kuni 1 km | Seitse taset: vaadake seda Youtube'is: https://youtu.be/vdq5BanVS0YVõite olla näinud palju juhtmega ja traadita veetaseme indikaatoreid, mis võimaldaksid ulatust kuni 100 kuni 200 meetrit. Kuid selles juhendis näete pikamaa traadita veetaseme indikaatorit
Pikaajaline WiFi -skanner ESP8266 abil: 6 sammu (piltidega)
")
Pikaajaline WiFi -skanner ESP8266 abil: selles juhendis valmistan patareitoitega kaasaskantava pikamaa 2,5 -ribalise WiFi -skannimisseadme, mida kasutatakse minu koduvõrgu jaoks sobivaima kanali määramiseks. Seda saab kasutada ka avatud WiFi -pöörduspunktide leidmiseks liikvel olles. Valmistamise hind: umbes 25 dollarit