")
Sisukord:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 08:47.
- Viimati modifitseeritud 2025-01-23 14:40.




Motivatsioon
Mulle väga meeldivad POV (visiooni püsivus) kuvarid! Neid pole mitte ainult huvitav vaadata, vaid ka suur väljakutse nende arendamiseks. See on tõesti interdistsiplinaarne ülesanne. Teil on vaja palju oskusi: mehaaniline, elektrooniline, programmeerimine ja nii edasi!
Olen alati tahtnud ise ehitada ja muuta see võimalikult suureks ja võimekamaks. Aasta tagasi tegin ära! See oli palju tööd ja väga keeruline. Mulle meeldivad sellised väljakutsed. Nii et see oli lõbus;-)
Nüüd tahan ka, et ehitaksite selle ise. Saate seda võtta juhendina omaenda väljatöötamiseks või järgige lihtsalt juhiseid minu POV -ekraani koopia saamiseks. Püüan välja tuua kõik väljakutsed, mis mul tuli ületada, et minu oma teha.
Kordasin oma disaini, et seda oleks võimalikult lihtne taastada. SMT komponente pole ja kõik peaksid algajad olema jootetavad. Ärge saage valesti aru, see on ikka väga suur väljakutse kõik kokku panna. Aga see peaks olema teostatav!
HOIATUS: See projekt sisaldab LED -e, mida uuendatakse suure kiirusega ja mis võivad vallandada krampe valgustundliku epilepsiaga inimestele
Kuidas see töötab?
Siit saate lugeda, kuidas POV -ekraan üldiselt töötab.
Esiteks vajame allikat, mis voogesitab videosignaali. Algses disainis tegin seda WIFI kaudu. Kirjutasin programmi, et jäädvustada arvuti ekraan ja saata need andmed WIFI kaudu ESP8266 -le. Selle lähenemisviisi probleem on see, et ESP8266 oli liiga aeglane ja WIFI ribalaiusest piisas vaid 16 kaadrit sekundis. Nüüd kasutame ESP32. Mõtlesin, et kõik probleemid on fikseeritud, kuid selgus, et ka ESP32 ei paku WIFI kaudu suuremat ribalaiust kui ESP8266. ESP32 -l on videovoo dekodeerimiseks siiski piisavalt arvutusvõimsust. Nii et lõpuks saatsin JPEG -pilte WIFI kaudu ESP32 -le. Seetõttu majutab ESP32 veebisaiti. Sellel saidil saate valida pilte või videoid ja veebisait voogesitab seejärel JPEG -faile ESP32 -sse. JPEG -dekodeerimine vajab palju mälu, nii et ka meil on seal probleem. Aga see töötab hetkel. Võib -olla leian hiljem parema lahenduse.
Järgmisena peame LED -e ise juhtima. Selle toimimiseks peame teadma LED -ide täpset asukohta igal hetkel. Seetõttu lisasin Halli efekti anduri. Iga pöörlemine läbib magnetit ja võimaldab seega tuvastada. Seejärel mõõdame pöörlemise aega. Eeldame, et järgmine pöörlemine võtab sama palju aega. Seetõttu saame oma positsiooni arvutada. Seda protsessi korratakse ikka ja jälle. LED -ide juhtimiseks kasutame FPGA -d. Võiksime kasutada ka mikroprotsessorit, kuid see läheb tõenäoliselt liiga aeglaselt. Enamikku väliseid LED -e tuleb värskendada umbes 10 000 korda sekundis. FPGA on hõlpsasti oma ülesannete kõrgusel ja teeb seda vähem värisemisega.
Kui LED -e tuleb nii sageli värskendada, vajame ka kiireid LED -e. Algses disainis kasutasin APA102 LED -e. Nende värskendussagedus on umbes 20KHz. Proovisin nende LED -idega LED -ribasid hankida, kuid veebimüüja saatis mulle SK9822 -d ja ütles mulle, et need on samad (juhtus kaks korda …) Nii et kasutame SK9822 -d. Nende värskendussagedus on vaid 4,7 kHz, kuid sellest loodetavasti piisab. Neil on ka veidi erinev protokoll. Ole lihtsalt teadlik. Nii et ESP32 lükkab pildiraamid FPGA -le. Seejärel juhib FPGA LED -e.
Nüüd peavad LED -id lihtsalt pöörlema. Seetõttu kasutame alalisvoolumootorit. Seda mootorit juhitakse ESP8266 PWM -signaali kaudu. ESP8266 on ühendatud ka WIFI kaudu ESP32 -ga. Seetõttu vajame pöörlemiskiiruse mõõtmiseks ainult ühte andurit. Algses disainis kasutasin kahte.
Lisateavet süsteemi kohta leiate minu videost algse disaini kohta.
Tööriistad
Kasutasin järgmisi tööriistu:
- 3D printer
- Jootekolb
- Kuum liim
- Super liim
- Micro USB kaabel
- Käärid
- Puur + puidutrell 3 4 8 ja 12mm
- Kruvikeeraja
- Lamedad tangid
- Küljelõikur
- Traadi eemaldaja
- Värvivarud
- Liivapaber
Telli
Avasin TINDIE poe. Nii et kui soovite, võite komplekti osta ja aidata mul rohkem selliseid projekte teha;-)
OSH
Nagu alati, avaldatakse siin kõik, mida näete, avatud lähtekoodiga.
Uuendused
Siin on mõned asjad, mida soovin tulevikus parandada:
-
Suurem värvide eraldusvõime 12 bitilt 24 bitini => seetõttu vajame rohkem RAM -i sisaldavat FPGA -d =>
Cmod A7, need sobivad tihvtidega:-)
- ESP32 koos PSRAM -iga, et vältida mäluprobleeme
- Pintsli probleemi lahendamine…
Tarvikud
Eritellimusel valmistatud osad
Peate need tellima või minult komplekti tellima!
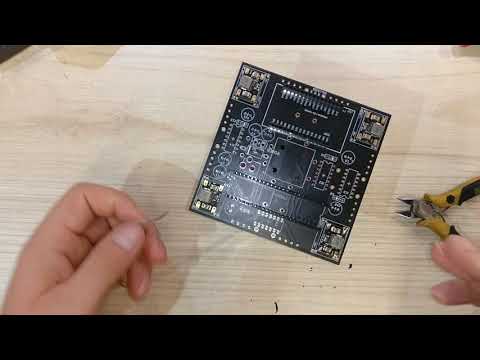
1 * Peamine PCB (gerber -failid asuvad kausta gerber main.zip all)
1 * Mootori draiveri trükkplaat (gerberi failid on kausta gerber motor.zip all)
4 * Corners 3D 1 Print (stl -fail asub kausta 3D corner.stl all)
1 * Peamine trükkplaadihoidja 3D 3 Prindi (stl -failid on kausta 3D hoidja1.stl, hoidja2.stl, hoidja3.stl all)
1 * Pintslihoidja 3D 2 Prindi (stl -failid on kausta 3D brush1.stl ja brush2.stl all)
Standardosad
Olge ettevaatlik, mõned lingid sisaldavad 10 või isegi 100 tükki pakki.
1m * SK9822 LED -riba 144 LED/m
1 * Cmod S6 FPGA
1 * Geekcreit 30 -pin ESP32 arendus
1 * Geekcreit D1 mini V2.2.0 ESP8266
4 * 74HCT04
5 * DC-DC 5V 4A
1 * alalisvoolumootor 775
44 * 100nf 50V
9 * 220uf 16V
10 * neodüümmagnet 10mmx2mm
1 * Halli efekti andur
2 * Carbon Bruches Dremel 4000
2 * mootori süsinikharjad
2 * Laagrid 6803ZZ
2 * mootorikinnitus 775
2 * DC pistik 5,5 x 2,1 mm
1 * Toide
1 * Nupp 8mm
2 * XT30PB pistiku isane ja emane PCB
2 * XT30 pistiku mees- ja naissoost kaabel
2 * 130Ohm 1/4W takisti
2 * MOSFET IRF3708PBF
2 * 1N5400
1 * Üherealise tihvti päis
1 * emane päis
1 * kaabel 30AWG
1 * kaabel 22AWG
Tööriistapood
1 * MDF 500mm x 500mm x 10mm
1 * MDF 100mm x 500mm x 10mm
4 * MDF 200mm x 510mm x 10mm
1 * akrüülklaas 500mm x 500mm x 2mm
12 * Metallist nurk 40mm x 40mm x 40mm
40 * Puidukruvi 3mm x 10mm
6 * M3 vahekaugus 12 mm
M3 ja M4 kruvid
3m * kaabel 2,5 mm2 üks traat/ jäik
Must värv MDF puidule
Ehitusaeg: ~ 10 tundi
Ehituse maksumus: ~ 300 €
Samm: laadige failid alla

Alustuseks peame esmalt alla laadima kõik selle projekti jaoks vajaliku.
Minge hoidla vabastamise lehele siin.
Seejärel laadige viimasest versioonist alla Release.zip ja pakkige see oma arvutisse lahti.
Iga kord, kui viitan failile selles juhendis, leiate selle sealt;-)
Samm: programmeerige püsivara
Samm 2.1: Programmeerige FPGA
FPGA programmeerimiseks peame installima tarkvara xilinxist:
Windows 10 jaoks peate installima: ISE Design Suite for Windows 10 (~ 7GB)
Windows 7 või XP jaoks saate installida: Lab Tools (~ 1 GB)
Pärast Open ISE iMPACT installimist klõpsake küsimuse korral "Ei" ja uue projekti vormi jaoks ka "Tühista". Ühendage FPGA Board Cmod S6 ja oodake draiverite installimist. Topeltklõpsake piiriskontrolli. Seejärel paremklõpsake uuel aknal ja valige "Initialize Chain". Klõpsake uuesti "Ei" ja sulgege uus vorm. Nüüd peaksite nägema sümbolit "SPI/BPI", topeltklõpsake seda. Valige fail "SPIFlash.mcs". Uues vormis valige "SPI PROM" ja "S25FL128S" ning andmete laius "4". Klõpsake "OK". Seejärel klõpsake uuesti sümbolil "FLASH". See peaks nüüd roheline olema. Seejärel vajutage "Programm". Klõpsake uuel vormil "OK" ja oodake. Selleks võib kuluda mõni minut.
Hästi tehtud, FPGA on valmis;-) Saate selle uuesti lahti ühendada!
Samm 2.2: Programmeerige ESP32
Installige esp32 tuum Arduino ID -le, saate seda õpetust järgida. V1.0.2 on soovitatav.
Vajalikud raamatukogud:
- AutoPID by Ryan Downing V1.0.3 (saab installida üle teegihalduri)
- Gil Maimoni ArduinoWebsockets, minu muudetud (laadige alla zip -fail ja installige see)
Avage fail povdisplay.ino kaustas povdisplay.
Valige tööriistatahvli alt: "DOIT ESP32 DEVKIT V1". Jäta muud seaded selliseks, nagu need on.
Ühendage esp32 plaat USB kaudu ja laadige programm alla.
Samm 2.3: Programmeerige ESP8266
Installige ESP8266 tuum Arduino ID -le, saate seda õpetust järgida.
Raamatukogusid pole vaja!
Avage fail motordrive.ino kaustas motordrive.
Valige tööriistade pardal: "Üldine ESP8266 moodul". Jäta muud seaded selliseks, nagu need on.
Ühendage plaat esp8266 USB kaudu ja laadige programm alla.
Samm: jootke PCB -d




ETAPP 3.1 Jootmismootori draiver PCB
Järgmised komponendid on joodetud:
-
WEMOS1 (Geekcreit D1 mini V2.2.0 ESP8266)
- Jootke tihvtide päised WEMOS -plaadi külge
- Jootke naissoost päised trükkplaadil
-
DCDC (DC-DC 5V 4A)
- Kasutage tihvti päisest 4 tihvti ja jootke DC-DC muundur otse plaadile
- Olge orientatsiooni suhtes ettevaatlik, see peaks sobima siiditrükiga
- CN1 (alalisvoolu pistik 5,5 x 2,1 mm)
-
1N5400
Olge orientatsiooni suhtes ettevaatlik, dioodi valge joon peab olema siiditrükil oleva joonega samal pool
-
220u (220uf 16V)
Olge orientatsiooniga ettevaatlik, valge joon peab siiditrükil olema pluss vastasküljel
- R1 ja R1 (130Ohm 1/4W takisti)
-
Q1 ja Q2 (MOSFET IRF3708PBF)
Olge orientatsiooni suhtes ettevaatlik, metallist tagakülg peab olema siiditrükil paksu joonega küljel
-
MOOTOR (XT30PB pistiku emase PCB)
Olge orienteerumisega ettevaatlik, ümar ots peab asuma siiditrükil märgitud küljel
-
LEDid ja TASTER (XT30PB pistiku isane PCB)
Olge orienteerumisega ettevaatlik, ümar ots peab asuma siiditrükil märgitud küljel
ETAPP 3.2 Jootma peamine PCB
Järgmised komponendid on joodetud:
-
CMODS6 (Cmod S6 FPGA)
Kaasas peaksid olema tihvtide päised. Jootke need trükkplaadile
-
ESP (Geekcreit 30 pin ESP32 arendus)
Kasutage naissoost päiseid ja jootke need trükkplaadile
-
DCDC1 - DCDC4 (DC -DC 5V 4A)
- Kasutage tihvti päisest 4 tihvti ja jootke DC-DC muundur otse plaadile
- Olge orientatsiooni suhtes ettevaatlik, see peaks sobima siiditrükiga
- POWER_TEST (alalisvoolu pistik 5,5 x 2,1 mm)
-
D1 (1N5400)
Olge orientatsiooni suhtes ettevaatlik, dioodil olev valge joon peab olema samal küljel siidiekraanil oleva joonega
-
POWER (XT30PB pistiku emase PCB)
Olge orienteerumisega ettevaatlik, ümar ots peab asuma siiditrükil märgitud küljel
-
C1, C3, C4, C6, C7, C9, C10, C11 (220uf 16V)
Olge orientatsiooni suhtes ettevaatlik, kondensaatori valge joon peab siidiekraanil olema pluss vastasküljel
- C2, C5, C8, C12 (100nf 50V)
-
IC1 - IC4 (74HCT04)
Olge ettevaatlik, et joondada IC väljalõige siidiekraanil oleva märgistusega
SAMM 3.3 Kuum liim
Peamine trükkplaat pöörleb väga kiiresti. Seega peame probleemide vältimiseks liimima kondensaatorid (C1, C3, C4, C6, C7, C9, C10, C11) trükkplaadile. Selleks kasutage lihtsalt kuuma liimi.
Samm: valmistage ribad ette

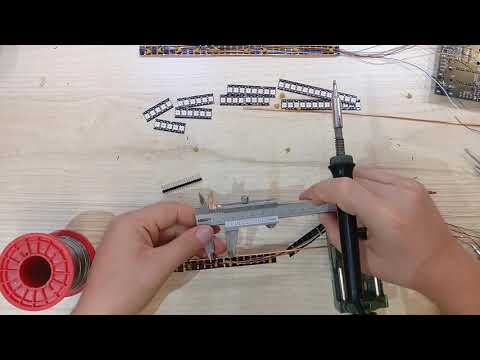



SAMM 4.1 Lõika riba tükkideks
Eemaldage veekaitse kääridega.
Vajame nelja tiiba ja iga tiib sisaldab nelja rühma. Üks WING on eriline, sellel on üks LED rohkem kui teistel.
TIIV1:
- G1: 5 LED -i (kõige välimine rühm)
- G2: 6 LED -i
- G3: 8 LED -i
- G4: 14 LED -i
Tiib2 - tiib4:
- G1: 5 LED -i (kõige välimine rühm)
- G2: 6 LED -i
- G3: 8 LED -i
- G4: 13 LED -i
Seetõttu vajame 129 valgusdioodi ja meie ribal on 144, nii et meil on teatud tolerants vale lõigu puhul;-) Halvimal juhul võite lõike jootma hakata.
Lõika valgusdioodide vahele võimalikult keskele.
SAMM 4.2 Jootekaablid LED -riba külge
Igas LED -riba segmendis jootke kaks 30AWG juhet kellale ja andmestikule. Need on kaks tihvti keskel. Olge ettevaatlik, et joote neid LED -riba sisendiga. Tavaliselt näitavad nooled andmevoo suunda. Kaablid peaksid olema umbes pool meetrit pikad
Lõigake riba teisest küljest kõik ära, et tiibade kokkupanemisel vältida lühist erinevate rühmade andmete ja kellanuppude vahel.
SAMM 4.3 Jootekondensaatorid
Igas rühmas joodetakse kaks kondensaatorit (100nf 50V) LED -riba segmentide tagaküljel mõlemas otsas. G4 jaoks jootke ka üks keskel. Kaablid peaksid kondensaatorite alla minema, et jätta ruumi, kuid mitte liiga palju.
ETAPP 4.4 Pange tiivad kokku
Iga tiiva jaoks viige juhtmed G1 -st G2 -ni ja seejärel need juhtmed läbi G3 ja sama G4 -ga.
ETAPP 4.4 Jootke rühmad kokku
Nüüd vajame vaskkaablit (kaabel 2,5 mm2 üks traat/jäik). Lõika see kaheksaks umbes 30 cm pikkuseks tükiks. Eemaldage kõigi juhtmete isolatsioon. Sirgendage kaableid nii palju kui võimalik. Võite kinnitada ühe otsa kruviklambrisse ja hoida teist lamedate tangidega ning seejärel haamriga lüüa tangidele.
Fikseerige kaabel ühel küljel, et sellega töötamine oleks lihtsam. Seejärel jootke esimene rühm selle juurde. Joondage LED -riba segment kaabliga ja jootke see ühel küljel kahe kondensaatoriga. Kaabel peaks lamama lamedale LED -ribale. Jätkake järgmise grupiga. Olge ettevaatlik, et kahe LED -rühma vaheline kaugus oleks samuti 7 mm. Lõpuks peaks kõigi valgusdioodide vahel olema sama vahe. Jätkake ülejäänud kahe rühmaga. Viimasel rühmal jootke kõik kolm kondensaatorit juhtme külge.
Seejärel lõigake kaabel otsa. Jätkake teise kaabliga riba teisel küljel.
Nüüd on esimene tiib valmis! Tehke sama ka ülejäänud kolme tiiva puhul.
SAMM 4.5 Painutage kondensaatorid
Lihtsalt painutage neid kõiki, et ribad oleksid õhukesed.
Samm: jootke ribad põhiplaadil




SAMM 5.1 Kontrollige polarisatsiooni
Kõigepealt peame teadma LED -riba polarisatsiooni. Teisisõnu: kus 5V ja maapind on trükkplaadi suhtes. See sõltub tõesti teie olemasolevast LED -ribast ja võib olla ükskõik kuidas.
Hoidke ühte tiiba peamise trükkplaadi küljes. LED -ribal olevad nooled peavad näitama trükkplaadi keskpunkti. Nüüd vaadake, kas 5V on DATA või tihvtide CLOCK poolel.
Kui 5 V on DATA poolel, on teil hea ja saate 2,5 mm2 vaske kasutada LED -riba jootmiseks otse trükkplaadile.
Kui ei, siis peate kahe külje kriipsutamiseks kasutama 22AWG kaablit. Seetõttu jootke kaabel LED -riba külge ja tõmmake vasak ja parem külg läbi ning jootke see trükkplaadile.
SAMM 5.2 Jootma 2,5 mm2 kaabel
Kasutage ülejäänud 2,5 mm2 vaskkaablit ja eemaldage kõik. Jootke need trükkplaadi ülemisele küljele. Lõigake joodetud traat umbes 1 cm kõrgusele.
SAMM 5.3 Jootke esimene tiib
Kasutage pikemat tiiba ja asetage see trükkplaadile (LED -id1), nagu siidiekraanil näidatud. Jootke see 2,5 mm2 juhtmete külge. Tehke tõeliselt tugevad ühendused, see näeb pöörlemise ajal palju jõudu! Seejärel ühendage 1. grupi kaablid G1 andmete ja G1 kellaga.
Ärge unustage toiteühendust jootma, nagu eespool kirjeldatud.
Ühendage ESP32 ja FPGA (48 ja 1 on märgitud poolel) ja ühendage plaat toiteallikaga.
Enamik väliseid LED -e peaksid nüüd siniselt vilkuma (selleks võib kuluda kuni 40 sekundit). Kui ei, siis kontrollige, kas CLOCK ja DATA on õigesti ühendatud.
SAMM 5.4 Halli efekti andur
Jootke naissoost pin -päis (kolme tihvtiga) saali. Hiljem ühendame anduri sellega.
Jootke andur (Halli efekti andur) isase tihvtiga päise külge. Lingid anduri ja tihvti päisega peaksid olema umbes 25 mm.
SAMM 5.5 Jätka ülejäänud tiibadega
Valgusdioodide2 - valgusdioodide4 == WING2 - WING4 puhul tehke sama toimingut nagu WING1 puhul.
Aeg -ajalt lülitage PCB sisse ja kontrollige, kas kõik vilgub. Muster algab kõige välimise lediga ja läheb sissepoole ning algab uuesti.
SAMM 5.6 Tasakaal
Püüdke tasakaalustada peamist trükkplaati keskel terava esemega. Kui üks pool kaalub rohkem, proovige teisele poole lisada jootet. See ei pea olema täiuslik, kuid liiga palju tasakaalustamatust põhjustab hiljem töötamise ajal palju vibratsiooni, mis võib põhjustada mehaanilisi probleeme.
6. samm: esimene värvimine

Etapp 6.1: puurimine
Peame puurima mõned augud:
500*500 MDF -plaadil vajame kahte auku. Vaata faili drill_wood_500_500.pdf ja puuri augud vastavalt plaanile.
500*100 MDF -plaadil vajame palju auke. Seetõttu printige fail drill_wood_500_100_A4.pdf ja joondage see tahvlile. Puurige lihtsalt kohtadesse, kus augud on paberil märgitud.
Etapp 6.2: värvige
Värvige iga puidu üks külg. 500 x 500 MDF -plaadi puhul on see külg, millele puurisite.
Värvige 100x500 puidu mõlemad küljed.
Samuti saate metallnurgad mustaks värvida. See näeb parem välja;-)
Ülejäänud värvitakse, kui oleme kõik kokku pannud (karbi väliskülg).
Samm: mehaaniline kokkupanek

Samm 7.1 Paigaldage mootorijuhi trükkplaat
PCB on paigaldatud 100 x 500 MDF -plaadile. Kasutage vahekaugusi (M3 vahekaugus 12 mm) ja mõnda m3 kruvi ja mutrit.
Samm 7.2 Kinnitusklambrid
Paigaldage kaks kronsteini (mootorikinnitus 775) 100 x 500 MDF -plaadile M4 -kruvidega.
Samm 7.3 Hoidja ettevalmistamine
Kaks piiret (laagrid 6803ZZ) tuleb välja lülitada. Me vajame sellest kahte välimist rõngast.
Jootke 22AWG juhtmed iga rõnga külge. Üks must ja üks punane.
Võtke hoidiku 3D -prinditud osad ja pange need kokku.
Pange kõik seitse M3 mutrit vastavatesse aukudesse ja libistage rõngas punase juhtmega esmalt hoidikule, seejärel vahekaugus ja seejärel rõngas musta juhtmega. Lisage kolmas tükk peal ja keerake kruvid sisse.
Lõigake kaks juhtmest 2 cm kaugusele ja jootke pistik (XT30 pistikukaabel) selle külge. Must kaabel läheb kõverdatud küljele.
Samm 7.4 Mootori paigaldamine
Keerake mootor (alalisvoolumootor 775) 100 x 500 MDF -plaadi keskel asuva mootorikinnituse külge.
Paigaldage hoidik mootorile ja keerake kinni.
Samm 7.5 Pintslite paigaldamine
Plaanisin kasutada Dremeli pintslit (Carbon Brushes Dremel 4000). Meil on vaja kasutada teist kivisütt (mootori süsinikharjad), sest Dremeli harjade söel on liiga kõrge takistus. Ma jätsin selle arendusprotsessis kahe silma vahele. Seega kasutame mootoriharju ja lihvime need dremeli harjade suuruseks.
Lõigake traat mootoriharjast 5 mm kaugusele söest.
Seejärel kasutame liivapaberit söe lõikamiseks järgmiste mõõtmeteni: 8,4 x 6,3 x 4,8 mm
Mootoriharja üks külg on 6,1 mm, seega peame lihvima ainult kahte külge.
Võite proovida, kas see libiseb hõlpsalt harjahoidikusse, siis on kõik korras.
Proovige ka ülaosas kõverat lihvida, et parandada ühendust metallrõngastega.
Jootke 22AWG traat söe juurde mõlema söe jaoks. Kasutage punast ja musta traati. Sisestage vedru dremeli harjast.
Sisestage harjad harjahoidikusse. Punase juhtmega pintsel läheb ülaossa. Hoidja ülemine külg on natuke paksem. Olge ettevaatlik, et kaks vedru ei puutuks üksteisega kokku.
Kinnitage hoidik alusele mutrite ja m3 kruvidega.
Paigaldage harjahoidiku alus kinnitatud mootorikinnituse külge. Kasutage kronsteiniga kaasasolevaid M4 kruvisid ja mutreid.
Mootor peaks saama vabalt keerutada.
Juhtige kaks juhtmest kahe kronsteini vahele.
Katkestage kaks juhtmest nii, et need jõuaksid lihtsalt trükkplaadini ja jootaks selle (XT30 pistikukaabel). Must kaabel läheb kumerale küljele.
Jootke kaks 22AWG juhet mootorite külge ja lõigake need kauguselt, et hõlpsasti trükkplaadile jõuda, ja jootke see (XT30 pistikukaabel) selle külge. Must kaabel läheb kumerale küljele.
8. samm: lõpetage
Soovitan:
YADPF (VEEL veel üks digitaalne pildiraam): 7 sammu (koos piltidega)
: 7 sammu (koos piltidega)")
YADPF (VEEL Teine digitaalne pildiraam): Ma tean, et see pole uus asi, ma tean, ma olen mõnda neist projektidest siin näinud, kuid ma olen alati tahtnud luua oma digitaalse pildiraami. Kõik pildiraamid, mida ma näinud olen, on toredad, aga ma otsisin midagi muud, ma otsin tõeliselt toredat fotot
Sisse lülitatud riiviahel koos UC -ga. Üks nupp. Üks tihvt. Diskreetne komponent: 5 sammu

Sisse lülitatud riiviahel koos UC -ga. Üks nupp. Üks tihvt. Diskreetne komponent: Tere kõigile, otsisin võrgust sisse/välja lülitust. Kõik, mis ma leidsin, ei olnud see, mida ma otsisin. Ma rääkisin iseendaga, selleks on tingimata võimalus. Seda ma vajasin.-Ainult üks nupp, mida saab sisse ja välja lülitada
Veel üks juhend DIYMalli RFID-RC522 ja Nokia LCD5110 kasutamiseks Arduinoga: 8 sammu (koos piltidega)
")
Veel üks juhis DIYMall RFID-RC522 ja Nokia LCD5110 kasutamiseks Arduinoga: Miks ma tundsin vajadust luua DIYMall RFID-RC522 ja Nokia LCD5110 jaoks teine juhend? Ausalt öeldes töötasin mullu eelmisel aastal mõlema seadme abil kontseptsiooni tõestamise kallal, kasutades mõlemaid seadmeid ja kuidagi "vales kohas"
IoT kasside söötja, mis kasutab osakeste footonit, mis on integreeritud Alexa, SmartThingsi, IFTTT ja Google'i arvutustabelitega: 7 sammu (koos piltidega)
")
IoT kassisöötja, mis kasutab osakeste footonit, mis on integreeritud Alexa, SmartThingsi, IFTTT ja Google'i arvutustabelitega: automaatse kassisöötja vajadus on iseenesestmõistetav. Kassid (meie kassi nimi on Bella) võivad olla näljasena ebameeldivad ja kui teie kass on nagu minu, sööb see kausi iga kord kuivana. Vajasin viisi, kuidas väljastada kontrollitud kogus toitu automaatselt
Kasutage odava hinnaga mis tahes 5.1 kõlarisüsteemi koos mis tahes MP3 -mängija või arvutiga!: 4 sammu

Kasutage odavalt mis tahes 5.1 kõlarisüsteemi koos mis tahes MP3 -mängija või arvutiga!: (See on minu esimene juhendatav ja inglise keel pole minu emakeel) Ostsin omal ajal odavalt Creative Inspire 5100 kõlarite komplekti. Ma kasutasin seda oma töölauaga, millel oli 5.1 helikaart (PCI). Siis kasutasin seda koos sülearvutiga, kellel oli