")
Sisukord:
- Autor John Day day@howwhatproduce.com.
- Public 2024-01-30 08:46.
- Viimati modifitseeritud 2025-01-23 14:40.



Fusion 360 projektid »
Tere, kaasloojad seal, selles juhendis näitan teile, kuidas teha suhteliselt väikese eelarvega isetehtud elektrirula. Minu ehitatud laud suudab saavutada kiirust umbes 40 km/h (26 mph) ja joosta umbes 18 km.
Ülal on videojuhend ja mõned pildid minu ehitamisest. Palun toetage minu tööd, tellides minu YouTube'i kanali
Lõpuks uisutage alati oma võimaluste piires, olenemata sellest, millega sõidate, kandke alati kiivrit ja sobivat turvavarustust.
Nii et öeldes alustame!
Tarvikud
Siin on kõik tarvikud, mida vajate elektrilise rula ehitamiseks
Osad ja komponendid:
- Longboard, rula
-
Harja vähem alalisvoolumootorit
- Sensoriga BLDC mootor (see on parem kui minu oma)
- SensorLess BLDC mootor (odavam)
-
ESC (kiiruse regulaator)
- Andurita ESC
- Sensor ESC (VESC)
-
Ajamirong
- Rihmaratta rihma versioon
- Keti ketiratta versioon
- Mootori kinnitamise komplekt
-
Patareid
- 18650 rakku
- Lipo rakud
- Aku ümbris
Tööriistad ja tarvikud:
- Jootekolb
- Jootetraat
- Tööriistakast
- Metallfailid
- Puurida
- Puurid
- Plyers
Samm: õige rula või longboardi valimine


Esimene väljakutse oli leida rula, mida saaksin hiljem elektriliseks muuta. Oleksin võinud selle hõlpsalt ise ehitada, kuid mul polnud selleks sobivaid tööriistu. Igal juhul, kui tegemist on rulade valimisega, on üsna palju valikuid, nagu pennilaud, kiiruselaud, Longboard jne.
Parim valik oli muidugi Longboard, sest need on tavaliselt laiemad ja pikemad. Lisaks pehmetele ratastele on need tasakaalustatuma struktuuri tõttu ka töökindlamad, neid on lihtsam sõita, mistõttu sobivad need hästi algajatele ja meil on palju ruumi elektroonika lisamiseks, hiljem saate valida erinevat tüüpi töötab hästi, kuid pidage meeles, mis teile kõige paremini sobib, ja hankige see.
Samm: mootorite ja ESC valimine


Nii et siin algab lõbus osa, Tere tulemast lõbusate, kannatlike ja valikute maailma. Jah, valikud. Seal on palju valikuid, olgu need siis mootorid, ESC -d (kiiruse regulaator) või akud. Aga kuidas kitsendada seda, mida soovite või ei taha? Aitan teid nii hästi kui saan.
Mootor: on peamiselt kahte tüüpi alalisvoolumootoreid, 1) Harjatud alalisvoolumootor:
2) Harjadeta alalisvoolumootor (BLDC):
Otsite harjadeta (BLDC) väljundmootorit, mille kv -väärtus on 170 kuni 300 ja võimsus 1500 kuni 3000 vatti. Nii et mõelge oma kv -reitingule nii palju, kui palju teie plaadil on pöördemomenti, mida väiksem kv, seda suurem on pöördemoment. Minu mootori võimsus on 280 kV ja 2500 vatti, mis on üsna lihav ja 100 kg kaaluva inimese jaoks enam kui piisav.
ESC: ESC on lühend elektroonilisest kiiruse regulaatorist, kuna BLDC on bittide edasiarendus ja kasutab kiiruse reguleerimiseks 3 faasi, seega vajate kiiruse regulaatorit. ESC on ehituse „aju”. See on ühendus aku ja mootori vahel. See ühendub ka kaugjuhtimispuldi vastuvõtjaga. ESC saab vastuvõtjalt käsud (PWM -signaal), mis (töötsükkel) ütleb talle, kui palju kaugjuhtimispuldi gaasi vajutatakse. Seejärel kontrollib see akult mootorile kuluvat energiakogust, kontrollides seega mootori kiirust.
Üks, mida ma kasutan, on 24 volti ja 120 amprit, nii et kui teete matemaatikat, st võimsus = pinge * vool, siis 24 * 120 = 2880 vatti ja mootori võimsus on 2500 vatti, nii et meil on siin natuke ruumi.
Märkus: ESC on teie elektrilise rula ehituse üks osa, mida te EI taha odavalt välja osta. Odavam kiiruse regulaator võib süttida. Samuti saate soovi korral kasutada VESC -d, mis on ESC versioon.
3. samm: akupaki ehitamine




Aku määrab, kui kaugele võite minna. Soovite aku, mis sobib teie mootoriga. Aku, mille ma ehitasin, on 6S 3P 18650 Li-ion, mis tähendab, et mul on 6 liitiumioonakut järjestikku ja 3 paralleelselt. See tähendab, et minu aku pinge on 25,2 volti (6 x 4,2).
Aku mahutavust mõõdetakse mAh -s ja see määrab aku mahla. Mul on 7 800 mAh ja selle abil saate määrata, kui palju energiat teil on vatt-tundides.
Ma ei süvene aku koostamise üksikasjadesse, kuna mul on juba Instructabeli postitus, saate seda kontrollida!
Lisaks saate kasutada ka Li-Po 6S akut, nii et te ei pea selle ehitamisega tegelema, kuid ma ei soovita Li-Po elemente, kuna need võivad olla ohtlikud, kui neid ei käsitleta õigesti.
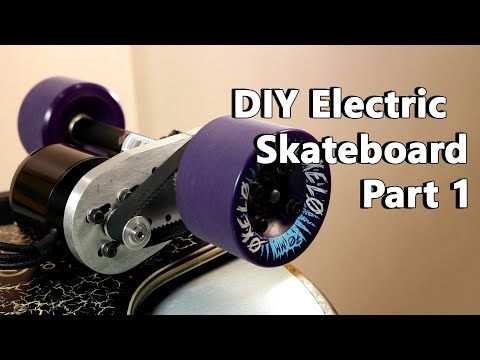
Samm: rihmaratas ja mootorikinnitus



Rihmaratas ja rihm: nii et teie rattad, mootoririhmaratas, rataste rihmaratas ja rihm peavad kõik sobima kokku ajamiga. Rattaratta ja mootori rihmaratta suhet nimetatakse „ülekandearvu vähendamiseks“. Soovite, et see oleks umbes 2,5, kuid võib ulatuda nii madalale kui 1,5 või isegi kõrgemale. Üldiselt on madalam vähendussuhe parem, kuid aeglane. Kasutasin 70 mm rattaratast, mis on suure kiiruse korral komplektis, ülekandearvuga 3.
Mootorikinnitus: Oma ehitatud jaoks otsustasin teha oma mootorikinnituse, sest tellitud oli väga habras ja kasutu.
Disainimisel kasutasin Autodesk Fusion 360 ja otsustasin projekteerimisel kasutada kinnitusmeetodit selle paigaldamiseks longboardi veoautodele. Lõin oma lõpliku versiooni ning mõningate testimiste ja 3D -printimise abil sain aru, kui palju libisemist saan mootori ja veoauto telje vahele, et tulevikus rihma pingutada.
Kui disain oli valmis, viisin selle lähedalasuvasse CNC töökotta ja lasin selle CNC abil toota. See on lahutamatu tootmisprotsess, mis kasutab arvutipõhiseid juhtelemente ja tööpinke, et eemaldada toorikult materjalikihid ja toodab eritellimusel valmistatud osa. Materjal, mida ma kasutasin, oli alumiinium 6061-T6, kuna sellega on lihtne töötada ja sellel on kõrge tugevus.
STEP -faili või STL -faili saate alla laadida, kui teile meeldib minu kujundus altpoolt.
5. etapp: ajami koostamine



Kõigepealt eemaldasin parema tagumise ratta, et saaksime oma kinnituse ja mootori kinnitada. Kuna Trucks'i rula oli kergelt kõver, kasutasin sellest vabanemiseks metallviili, nii et mootorikinnitus sobib ideaalselt rulale. Pärast mootorikinnituse paigaldamist paigaldasin mootori masinakruvide abil.
Kui see oli tehtud, oli aeg lisada meie rattale rihmaratas, et saaksime pöörleva energia mootorilt rattale üle kanda. See on tõesti lihtne protsess: asetage suurem rihmaratas täpselt ratta keskele ja märkige augud, kus peame ratast läbi puurima. Pärast puurimist kasutage rihmaratta ratta külge kinnitamiseks mõningaid masinakruvisid, ärge unustage kasutada keermelukustust või masinakruvidega iselukustuvat mutrit.
Nüüd kinnitage väiksem rihmaratas mootori võllile ja pange rihm koos rattaga kokku ja veenduge, et see on korralikult joondatud, nii et kõik kolm kokku moodustaksid meie ajami.
6. samm: elektroonika ja 3D -printimine



Pärast ajami lõppu saame oma ESC mootori külge kinnitada. Lihtsalt ühendage ESC -st kolm juhet kolme mootori juhtmega, ühendage nüüd aku ESC -ga ja lõpuks on aeg ühendada ESC raadiovastuvõtjaga.
Otsustasin ehitada oma raadiokontrolleri, kasutades Arduino ja nRF24L01 moodulit, kuid saate selle lihtsalt osta, kasutage seda., Selle ehitamiseks vajate
- Arduino Nano x2
- nRF24L01 moodul x2
- Juhtkangi moodul x1
- 500mAh 1S Li-Po aku x1
- TP4056 moodul x1
- Lüliti x1
- Võimendusmoodul
- 3D trükitud ümbris (laadige STL alla alt)
Ühendage saatja ja vastuvõtja vastavalt selles etapis esitatud vooluahelale ja laadige kood (allalaadimine alt üles) mõlemale Arduinole, seejärel ühendage vastuvõtja Arduino 5V, GND ja digitaalne pin 5 vastavalt ESC 5V, GND ja signaali PIN -koodiga.
Pärast vastuvõtja testi kinnitamist, kui mootor pöörleb õiges suunas, kui mitte, vahetage lihtsalt kaks juhtmest mootorilt ESC -le ja mootor pöörleb teises suunas. Nüüd peate vaid lisama kogu elektroonika ja akud korpusesse, millel on mul 3D -printer (allalaadimine altpoolt), nii et tegin kohandatud ümbrise, kuid võite kasutada mõnda plastkarpi ja paigaldada selle longboardi alla. valmis tänavatel veerema!
Samm: sa tegid seda

Sa tegid seda. Ehitasite just oma elektrilise longboardi. Jagage kindlasti oma pilte minuga minu sotsiaalmeedias.
Olgu! Nüüd numbrite kohta!
Kaal: 7,2 kg
Vahemaa: 7,5 cm
Tippkiirus: 40 km/h (võimalik saavutada 48 km/h, kuid sõitmine on väga ebastabiilne)
Reisi kiirus: 25 km/h
Vahemik: 18 kilomeetrit
Patareid: 6S 3P Li-ion (25.2V 7800mAh)
Nii et see on selle õpetuse jaoks üsna palju, kui teile meeldib minu töö, kaaluge minu YouTube'i kanalit, et leida rohkem hämmastavaid asju:
Eelseisvate projektide jaoks saate mind jälgida ka Facebookis, Twitteris jne
www.facebook.com/NematicsLab/
www.instagram.com/NematicsLab/
twitter.com/NematicsLab
Soovitan:
Tehke oma elektrimootoriga Longboard: 8 sammu (piltidega)
")
Tehke oma elektrimootoriga Longboard: Selles projektis näitan teile, kuidas ehitada elektrimootoriga longboard nullist. See suudab ühe laadimisega saavutada kiiruse kuni 34 km/h ja läbida kuni 20 km. Hinnangulised kulud on umbes 300 dollarit, mis teeb sellest hea alternatiivi kaubandusele
Hull elektriline Longboard Budet süsinikkiust tekiga: 6 sammu (piltidega)
")
Hullumeelne elektriline Longboard Budet süsinikkiust tekiga: hei, enne kui ma räägin endast ja miks ma otsustasin sellele teekonnale minna, tahaksin öelda, et palun vaadake minu videot eepilise ratsamontaaži kohta ja minu tegemispraktikat, mis on samuti oluline, palun tellige see aitab tõesti minu kolledži kursust, sest
Survival Electric Coil USB laetav tulemasin vanast PowerBankist: 7 sammu (koos piltidega)
")
Survival Electric Coil USB laetav tulemasin vanast PowerBankist: Tere inimesed, olen vana Powerbankist ehitanud Survival Electric Coil USB laetava välgumihklit, mida saab sisuliselt kasutada eksperimentideks ja väikese söe loomiseks, mida saab edasi kasutada looduses tule tekitamiseks või teie kodu ümbruses ilma
Jälgitav elektriline Longboard: 16 sammu (piltidega)
")
Jälgitav elektriline Longboard: see projekt koosneb elektrilisest longboardist, mis säilitab marsruudi vaarika pi abil. Neid seansse hoitakse mySQL -i andmebaasis ja neid kuvatakse minu veebisaidil, mis on tehtud mikroraamiga „Kolb”. (See on kooliprojekt
Electric Penny Board V1: 8 sammu (piltidega)
")
Electric Penny Board V1: see elektriline pennilaud on lollaka rula prototüüp